Pollution by definition is an unconcerned and uncontrolled contamination of the natural environment.
The major types of pollutions are
- Air
- Water
- Soil
- Particulate/ dust
- Sound
- Radiation
- Thermal
- Light
- Plastic
The effects are detrimental for healthy survival humans, animals and other living beings. Further, in most cases the change is not completely reversible.
Pollution introduction

In recent times, we hear many concerns from social activists and groups regarding the pollution crisis.
In fact, there is an immediate requirement to contain it and minimize for better health and prevent endanger to valuable species on the earth.
Pollution is drastically rising in all countries due to the rise in human activity associated with modern technology and population growth. Even the daily normal livelihood requirements are high contributing factors to never-ending pollution of all sorts. Pollution poses health hazards, endangers wildlife, and makes the planet unsafe for future human survival. The present technology and desire for development add more to pollution but the steps taken to control or decrease it are very meager.
Types of pollution:
The natural resources which are freely available a gift of nature are polluted and they can be broadly divided into following types like

Air pollution: This is the contamination of natural air with dangerous gases. This is a major contributor to environmental pollution. The presence of a lot of green trees and plants is one of the options to minimize this pollution.
Many gases like carbon monoxide, carbon dioxide, sulfur dioxide, methane, and other harmful gases are emitted from automobiles (powered by petroleum), industries, and sometimes by natural calamities like volcanoes.
Read: Causes of air pollution
Another type is particulate air pollution, it seems many of us are quite unaware of it. But if one stays near any industry, then it can be noticed. There is always some sort of particulate dust from the chimneys of the factory. This is harmful especially to the respiratory system are it is directly exposed.
This air pollution can be minimized by filtration of effluents, a decrease in the use of petroleum-related automobiles, and also sufficient growth of trees.
Water pollution: After air, water is the resource that is highly contaminated.
 Both drinking water from rivers, ponds, and also seawater are contaminated by the discharge of large amounts of human, industrial wastes leading to water pollution.
Both drinking water from rivers, ponds, and also seawater are contaminated by the discharge of large amounts of human, industrial wastes leading to water pollution.
This makes the water harmful to drink and also endanger the lives of the sea and marine animals.

Land pollution: Land pollution is one that occurs due there is excess dumping of toxic waste. This can be a chemical or other waste material.
Polluting the land by harmful chemicals can lead to the entry of pollutants into the food chain. This is commonly caused by excess use of fertilizers in agriculture, irresponsible disposable of industrial wastes, etc. Even defecating in the open spaces also causes pollution. This leads to health issues like malnutrition as pollutants pass through plants to humans and animals.
Sound pollution: Also called noise pollution is a disturbance of a silent environment with harsh loud noises. This is mostly due to automobile sounds, the audio systems used for fun or public speeches, temples, mosques, churches, etc. This pollution has a severe impact especially on old people, small children. Even sound from industrial sirens, vehicle movements also contribute to noise pollution.
Dust pollution: This is pollution wherein the contamination is due to dust particles in the air. This can be from soil, roads, farming, and even due to mining, etc. From farms, this dust pollution occurs due to pollen grains as a part of pollination. While on the roads it is due to the unclean road overrun by vehicles. This air contamination by dust creates trouble for proper breathing leading to infections, congestion of breath, etc.
Radiation pollution: This is pollution due to abnormal radiation in the environment. This occurs due to the use of radioactive elements from atomic energy stations. From cell and mobile towers, by use of wireless Internet access modems, etc. This is one of the serious types of pollution and also neglected one with the interest of the business. Even it is said that birds like sparrows and insects like honey bees seem to be getting extinct from human areas due to these radiations.
Thermal pollution: This pollution arises due to the release of excess heat from thermal power plants, industries involved in metals molding, etc. The heat is released into the surrounding water rising the temperature of the locality drastically. This can be especially troublesome water and marine animals as the heat deprives them of oxygen and also changes the environment around them.
Light pollution: This type of pollution might seem quite strange but it is one of the common pollutions. Have you ever tried to see the sky for stars or for lunar eclipse when there is a cricket or football match going on in a nearby stadium? It is quite impossible. Even heavy light of opposite vehicles on the same road can lead to distractions for drivers. Light pollution effects especially at night as it disturbs the sleep of humans, birds, and other animals. This might some times affect the natural body rhythm or circadian clock. It is believed that light pollution is one of the causes of obesity, insomnia, and other health issues.
Plastic pollution: This is not a type but it deserves to be said one. The plastic and polythene due to their ability to withstand decomposition for years together add up to pollution. Plastic pollution can contribute to air, water, and soil pollution. 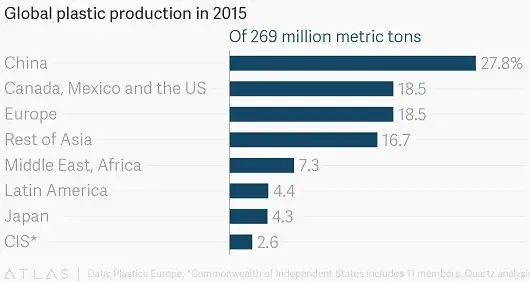
Even animals that graze this plastic die due to problems in the intestine.

I learned more about pollution
And it help me a lot
VERY USEFUL AND HELPFUL INFORMATION
It is very good information about pollution
Thank you for giving me good information to prepare for my seminar
It is good for my studies
Yaa i like it
Very useful information on pollution and easy to read in paper
Please save this world to this type of pollution.
I love this informer because of lot hard work to share this valuable information with us……. I love you so much………..
It’s a great page!
I enjoyed it a lot!
I cheer u to post more n more!
Well thanks it helped me a lot.
too good i like it
Very good and beautiful information I have ever read??..!
please do some thing to reduce pollution.
Good articles , very helpful for students to prepare their assignments or general knowledge .
Good effort keep it up.
The simple life was best.
Its my first assignment .I did very good in my class with the help of these types of pollution which I have ever read.
its really awesome and pls frnds do something for environment and stop polluting our beatiful envoronment
Thankyou
I am very excited for the usefull notes
i very much liked it
Very useful text
Nice definition I like this
I like this site its good work, keep it up God bless you!
Thanx ! Nice info. and your support
I am very much excited and i like simply this topic
I like the topic pollution.
Plz do something for environment my dear friends
good!keep it up
I am in love with this site….it gives me the perfect info of my searches…
wonderful
Lamia! Welcome..
thank you
Tiahna! thanx for stopping by..
wow this was exactly what i was looking for, it helped a lot with my report 🙂
nice information. thanx to that who send this information…….
we
should protect our environnement and the nature is blesse in our life
oye…… pls dont use polymer substance frien
Nirmit jalan! you are welcome again. thanks for the complement.
good definations
Gοod blog post. I cеrtainlу lоνe this site.
Keep іt up!